Volvo Shows Off A Prototype Of Its Self-Emptying Trash Can
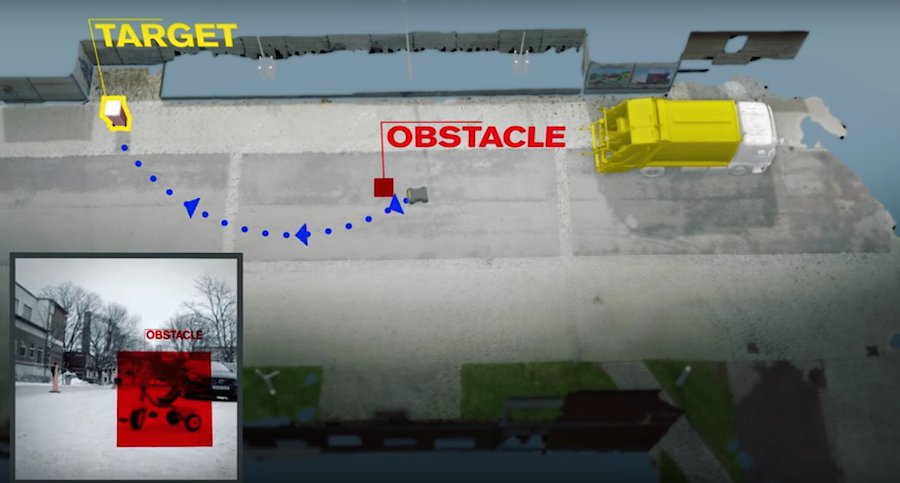
The initial concept involved just the robot, which relied on maps of the neighborhood and likely bin locations (as well as GPS, LiDAR and accelerometers) to help it navigate. The new iteration, on the other hand, also employs an aerial drone that lifts off from the garbage truck's roof to act as a pair of "eyes in the sky" for the ROAR, telling it where the trash cans actually are, not just where they're supposed to be.
Volvo teamed with undergrads at three universities – Chalmers University of Technology, Mälardalen University and Penn State University – to design and construct the prototype in just four months. "We predict a future with more automation," Per-Lage Götvall, project manager for robot development in the Volvo Group, said in a statement. "This project is intended to stimulate our imagination, to test new concepts that may shape transport solutions of the future."
Related News